
Evaluating the paleoecology of the Megaraptora (Dinosauria: Theropoda) through biomechanical approaches
DOI:
https://doi.org/10.7203/sjp.29797 Abstract
Abstract
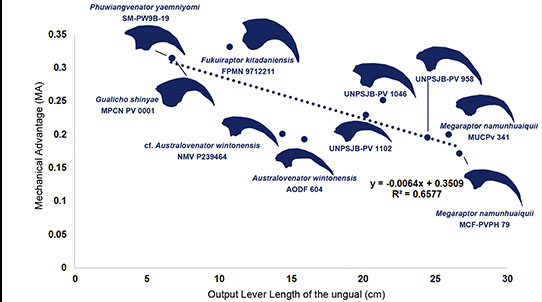
Megaraptoran theropods represent an enigmatic and unusual lineage of theropod dinosaurs that are characterized by their unique bauplan including a low, elongated skull and robust forelimbs with enlarged claws. Such an unusual morphology has led to speculations that these theropods primarily used forelimbs instead of jaws in prey capture or feeding, but biomechanical studies regarding in-depth evaluations of the functions of their claws or jaws have been scarce. In this work, mandibular force profiles of Australian megaraptoran Australovenator wintonensis are constructed through the principle of beam theory, and mechanical advantages of first manual unguals of various megaraptoran taxa are evaluated using third-class lever model. Mandibular force profiles reveal that the lower jaw of Australovenator wintonensisbehaved as a simple lever, suitable for delivering slashing bites, and likely unable to produce a high bite force. Biomechanical modeling of the first manual unguals of megaraptorans suggests a decrease in Mechanical Advantage in derived taxa, which indicates the claws became more adapted to hook-and-pull function during the course of evolution in this clade. Such results imply megaraptorans like Australovenator wintonensis mainly preyed on relatively small-sized animals, or relied more on their forelimbs to hunt large prey items through hooking the claws onto the victim and pulling them, tearing or slicing the flesh.
 Downloads
Downloads
Downloads
Additional Files
Published
How to Cite
-
Abstract663
-
Supplementary Information18
-
PDF492
Issue
Section
License
Copyright (c) 2024 Chan-gyu Yun

This work is licensed under a Creative Commons Attribution-NonCommercial 4.0 International License.
![]()
This is an open-access article distributed under the terms of the Creative Commons Attribution 4.0 International License.

